Altair Multi Body Solutions 2019 Release Notes
Highlights
- Optimize mechanisms with MotionSolve
- Topology Viewer
- Multi-Disciplinary tools
- Leaf Spring Builder enhancements
- New Full Vehicle Events
- Enveloping Tire Contact
- MDL Library Update Notice
- Other enhancements
- Resolved issues
Optimize Mechanisms with MotionSolve
Multi-body systems can now be optimized directly through MotionSolve. The 2019 version comes with an optimization capability native to the solver, all within the MotionView environment. It uses MotionSolve’s Design Sensitivity Analysis (DSA) for calculating sensitivities for use in gradient based algorithms. This is coupled to SLSQP, a well known gradient based optimization algorithm.
- MotionSolve Python API
- A python library in which the optimization problem is expressed. A model can be built and executed using this Python library. The rich set of functionalities available in Python and its application libraries can be easily integrated with MotionSolve capabilities to provide an open, extensible and incredibly powerful set of multi-body simulation capabilities.
- Optimization Wizard
- Guides you through the entire optimization process in MotionView by enabling you to select design variables, create responses, define objectives and constraints, solve the optimization problem, and review results.
- HWUs per Optimization Job
- The solver will check out 50 HWUs per optimization job, regardless of the number of design iterations being simulated as part of the optimization job.
Topology View
MotionView 2019 can display the model in a schematic form to study the topological connectivity.
The Topology View is available for Bodies, Joints, Bushings, SpringDampers, Forces and Beams.
The topological connections can also be viewed at a system/assembly level or at the level of the entire model.
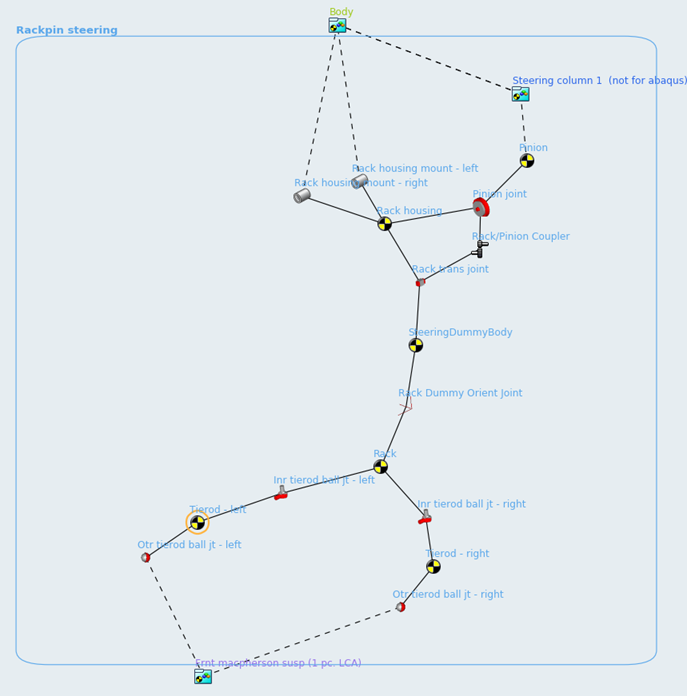
Figure 1.
Multi-Disciplinary Tools
The new Multi-Disciplinary Tools can be used to help you easily build analytical models for certain sub-systems, such as cams and gears, along with other utilities that work across different application such as HyperMesh and HyperGraph.
The Multi-Disciplinary Tools can include an analysis to extract loads for all types of forces, and imported in HyperMesh. In HyperMesh, the Multi-Disciplinary Tools provides utilities to transfer CAD, mesh, lines, and nodes to MotionView.
Leaf Spring Builder
- Canvas view controls
- You can now pan, zoom, and fit the view of leaf shapes on the canvas in the Leaf Spring Builder. You can also save hard copies of the leaf shapes to a variety of graphic file formats including .jpeg, .png, and .pdf.
- Friction option added to Contact Properties
- The Friction option has been added to Contact Properties, which allows you to specify different coefficients of friction for different contacts. In previous releases, the friction properties you defined on the General tab were employed for all contacts.
- Enter loaded leaf shapes
- The Leaf Spring Builder now supports entering leaf shapes in the loaded, design position. Often CAD for vehicles shows the leaf springs in the loaded, design position rather than in a free position. To allow for easy creation of a leaf spring model from CAD data, the Leaf Spring Builder now supports the design shape condition. Once you enter the loaded leaf shapes and the axle loading, the Leaf Spring Builder will distribute the axle load among the leaves to produce a spring model that you can use directly in the vehicle.
- Points orient Leaf Spring Beam elements
- Beam elements are now oriented using MotionView points, allowing you to easily modify the shape of a leaf in MotionView by moving the points. In previous releases, beam elements were oriented using Euler angles. Changing the leaf shape in MotionView required you to modify the point locations and the beam Euler angles.
- Support for non-rectangular leaf sections
- You can now enter a radius for leaf spring cross-sections. The Leaf
Spring Builder considers the radius when computing the beam mass and
area moments of inertia Ixx, Iyy, and Izz. Using a non-zero radius will
have a lower mass and lower bending stiffness compared to a rectangular
section (radius = 0).
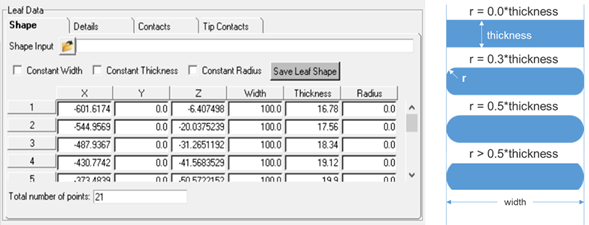
Figure 2. - New velocity output for leaf contacts
- The translational velocities used when calculating inter-leaf and tip liner contact forces are now output. In previous releases, only displacements were output. The F2, F3, and F4 channels are the X, Y, and Z displacement. The F6, F7, and F8 channels are the X, Y, and Z velocity. The Z direction is the normal contact force, while X and Y are the in plane directions for friction.
- Create inter-leaf contact between leaves that are not immediate neighbors
- Leaves that are not neighbors in the stack which overlap along the length of the spring with the potential for contact are now recognized, and appropriate interleaf contacts are created. In previous releases, overlap was not recognized.
- Build leaf springs when the spring seat is not parallel to the x-axis
- You can now build leaf spring models when the spring seat is not
parallel to the x-axis. In previous releases, the leaf shape data you
entered required the x-axis to be parallel to the spring seat where the
axle clamps to the spring. Once imported into MotionView, you then
rotated the leaf-spring, so the spring seat was not parallel to the
x-axis. This was inconvenient when, for example, your leaf shape data
was in vehicle coordinates and the spring seat was not parallel to the
vehicle’s longitudinal axis.
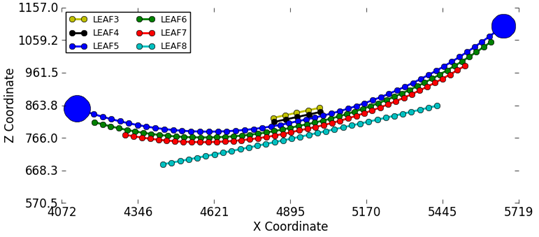
Figure 3. - Contact properties parametric to datasets in the leaf spring system
- In previous releases, if you had leaf spring system loaded in MotionView and wanted to change the contact properties, you had to edit the contact properties for every contact or return to the Leaf Spring Builder and modify the properties, and then rebuild the leaf spring system.
- Build hockey-stick style leaf springs
- You can now build leaf springs with non-planner leaf shapes, commonly known as hockey-stick-style leaf springs. The leaf spring builder now accepts x, y, z coordinates as input for leaf shape points.
- Locate leaves using reference markers
- Each leaf of the spring is now located by a reference marker in the parent MotionView leaf spring system. Moving the reference marker enables you to move the entire leaf.
- Distribute inter-leaf contacts equally to the front and rear
- You can now create inter-leaf contacts that are distributed equally to the front and rear of the axle. In previous releases, you had to switch contacts from front to rear to place contacts at the rear of the axle.
- Select leaf tip contact properties
- You can now select contact properties for leaf tip contacts. The Leaf Builder automatically creates non-master-leaves for leaf contacts, and previously used default Metal-Metal contact properties. The interface now supports selecting any contact properties the leaf property file contains.
- Test using SAE J510 procedure
- Simulating the SAE J510 test procedure is now supported. In the SAE J510 test the shackle is removed, the spring is inverted with the eyes facing downward, and was supported vertically but allowed to spread. Vertical force is applied at the spring seat via a fixture to stroke the spring and the force deflection curve recorded.
- In the Leaf Spring Builder, gravity is inverted instead of inverting the
spring.

Figure 4.
Full Vehicle Events
- nPost Shaker event
- An nPost Shaker event can now be added to any vehicle. Posts can be coupled directly to the spindles or via spring-dampers to model tire stiffness. Input force or displacement signals can be obtained from .dac, .rsp, .rpc, or .csv files to the posts, and simulate the vehicle’s response to the input to assess vehicle ride or component loads.
- For more information, see n-Post
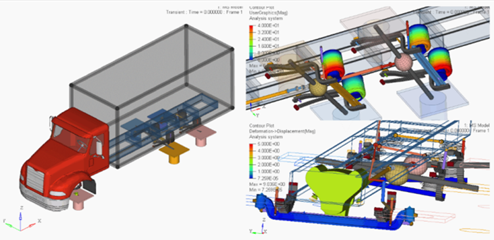
Figure 5. - Road Course Drive event
- Use the Road Course Drive event to simulate a vehicle driving on a road of your choice and assess vehicle dynamics, ride, or loads. You can select the road to drive the vehicle over, a path for the vehicle to follow, and a velocity profile which may be constant or specified by a curve of speed verses distance traveled.
- Event specific reports
- The View Report option has been added to enable you to generate a report for each full vehicle event that consists of plots and an animation for the event.
- For more information, see View Reports.
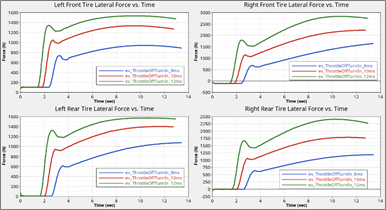
Figure 6. Event Report with Plots for Multiple Simulations
Enveloping Tire Contact
- FIALA Tire model enhanced with Elliptical Cam Contact model
- The FIALA tire model now supports an Elliptical Cam Contact model. The Contact model is based on the Elliptical Cam Contact method described in Pacejka’s Tire & Vehicle Dynamics Book. 3rd Edition (ISBN 978-0-08-097016-5).
- For more information, see Elliptical Cam Contact
Model.
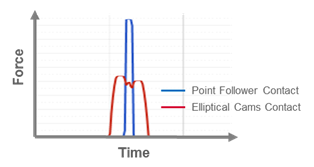
Figure 7. Point Follower Contact vs. Elliptical Cams Contact
MDL Library Update Notice
Steering system models included in the MDL car and light truck library and the heavy truck library will be updated in the 2019.1 release to remove the dummy bodies. The full vehicle and half vehicle events will be modified to not expect the dummy bodies in the steering system. The dummy bodies were added to support computing Static Design Factors during suspension analyses using ADAMS; however, the dummy bodies have caused user confusion and are not required by MotionSolve.
The 2019.1 release will include a model update utility for removing the dummy bodies from existing models created with the MDL Library steering system. In addition, half vehicle models created from the library will not directly support computation of static design factors using ADAMS.
Other Enhancements
- MotionView
-
- Calculate CG and inertias in the CG Inertia Summary tool
- The CG Inertia Summary now calculates CG and inertias in any general reference frame. CG can be calculated from any point, and inertias can be calculated at any point in the model.
- Import SLK files into the Data Summary tool
- The SLK file can be exported from the data summary, modified in an excel spreadsheet, and then re-imported. Expressions in the data (up to 255 characters) is also exported, thereby preserving the parametric relation between entities. An option to export evaluated values instead of expressions is also available.
- Ease of creation of system instance
- Using the Copy and Paste options, a new instance of a system can be easily created. The new instance shares the definition with the original instance from which it was copied. This functionality is applicable for all definition-based entities such as Analysis, Datasets and Templates. Any modification of the definition of the shared instance may break the sharing based on the Create a separate definition when modifying a shared instance settings access from .
- Default run directory
- A setting under for solver run files now offers the ability to specify a default folder for all solver runs. This information is stored in the model and will be available for subsequent model load.
- Interface node list file in Flexprep
- A list of interface nodes can be provided as a text file in the Flex Prep tool. The text file can contain the node numbers separated by commas or spaces. The node numbers can be spread among multiple lines.
- Flexbody damping ratio per mode
- Damping ratios can now be assigned to modes individually in the Flex Body – Modes dialog.
- Single RPC file from Fatigueprep
- By default, Fatigueprep hence forth will generate a single RPC file containing all channels. An option is available to create separate files per channel.
- Friction on universal joints
- An option to specify Both as a choice for Rotation constraints has been added for friction on universal joints. With this option, friction can be applied on both yokes simultaneously.
- Import contact entity in ADM
- A contact entity present in the ADM solver deck can now be imported as an equivalent contact entity.
- MotionSolve
-
- Linearization of model about a non-steady state operating point
- Several enhancements have been made to the solver such that the eigen
solution obtained when linearizing a model about a non-steady state
operating point are more robust.
- Improved threshold for matrix balancing.
- Improved calculation of the B matrix.
- Updated algorithm for choosing independent coordinates.
- Addition of extra rotational coordinates to all bodies in the mode.
- Gyroscopic effects in linear analysis
- Retrieving gyroscopic effects when performing a linear analysis becomes
important when analyzing rotating systems. MotionSolve can calculate eigen-solutions that
consider gyroscopic effects for rotating systems and compute “partial”
or “full” gyroscopic effects when linearising a rotating system.
- Partial: Implies that the angular momentum term is held constant when computing the solution. Here, is the 3x3 inertia matrix of the body in a body-fixed frame and is the angular velocity of the body in that frame. The results from using this approach will typically match reference results from OptiStruct for the same system. This is the default used by the solver.
- Full: Implies that the angular momentum term described above is not treated as constant when computing the solution.
<Param_Linear gyroscopic = Description NONE No gyroscopic effects are included in the linear solution. PARTIAL (default) Angular momentum term is held constant (see Partial description under Enhancements). FULL Angular momentum term is considered variable (see Full description under Enhancements). - Parasolid support
- MotionSolve now supports a newer version of Parasolid, v. 30.0.185. This version is consistent with what is used in MotionView to enable seamless simulations.
- MotionSolve Verification Manual
- The 2019 release contains a set of 12 models spanning kinematics, dynamics, static, and linear analyses that serve as verification problems for the MotionSolve solution. Documentation for these models is added to the product help and the models are available in the product installation.
Known Issues
- In certain cases, the right-click context menu may have longer loading times.
Resolved Issues
- MotionView
-
- Export MDL Snapshot option in the Run panel is not saved in the MDL.
- CADGraphics – Changing the filename erases values set in the Location tab.
- Check Model does not compute correct number of degrees of freedom for flex bodies and NLFE bodies.
- Suspect data indicates bodies that derive properties from graphics with zero/negative mass.
- Colors from the ColorMaterial property list are not read correctly into MotionSolve XML.
- Changing an FEM file in the File Graphics results in distorted graphics.
- Data in the Curve panel is not retained when changing from values to File/math and back to values.
- Cut and paste of CADGraphics in a system results in an erroneous file path.
- Application hangs when archiving a model with Templates.
- Loads are not exported correctly for connections that have an origin at a Global Origin.
- Exporting a model containing entities that refer to deactivated entities does not result in an error.
- An error does not display when a connection refers to the same body.
- The option to write MAF during export saves into the MDL.
- Saving a model after changing a joint type that supports initial conditions (Cylindrical, Revolute, Translation) to a different joint type results in errors when opening the model.
- The Help button accessed from does not work.
- The max step size option in the Contacts panel, Advanced tab cannot accept values greater than 1.0.
- MotionSolve
-
- In some cases, simulations involving modeling elements attached to the ground body would give incorrect results or even fail. These sets of issues have been fixed by modifying the way the grounded body is treated in MotionSolve.
- Applying rotation on a joint that is connected to a flexible body.
- Saving and loading models containing CDTire, such that there are no failures or discontinuities at the point of save/load.
- For noise in tire forces dependent on an axis of rotation, the solver now switches the Euler angles based on which axes of wheel body aligns with the axis of rotation. This change eliminates the numerical transience, so that choice of axes for the wheel body no longer affects the quality of the results.
- Noise reduction in inputs when fed to Control_SISO modeling element.
- The seventh parameter in the SWEEP function, the interval over which the function becomes fully active, is now consistent with the definition of the function.