A Double lane change event drives the vehicle through a lane change and a return to
lane maneuver, attempting to follow the centerline of the defined lane.
You can define the speed of the lane change, along with the lane dimensions. The Altair
Driver model is used to maintain speed throughout the event. The event supports right and
left lane changes. A plot template is available to plot the results.
A Double lane change does not have specific metrics associated with it. A lane change is
typically used as a subjective evaluation test. The Double lane change is similar to the ISO
Obstacle Avoidance maneuver and the NATO Double Lane change, but does not exactly follow
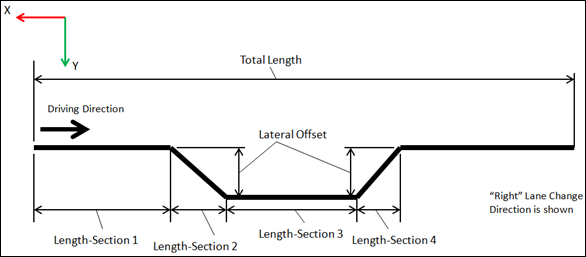
those standards. Figure 1. Double Lane Change - Path Figure 2.
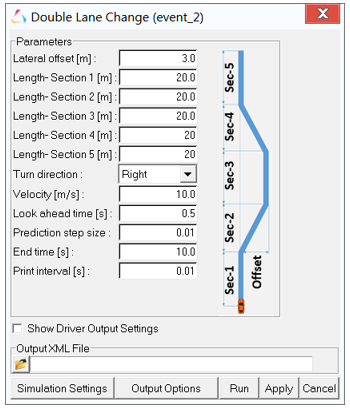
The parameters available in the Double Lane Change event are detailed in the following
table:
Parameter
Description
Lateral offset
Offset distance (meters) of the double lane change.
Length- Section 1
Length of the initial straight section of road, in meters.
Length- Section 2
Longitudinal Length of the initial lane change section of road
(meters).
Length- Section 3
Length of the center straight section of road (meters).
Length- Section 4
Length of the second lane change section of road (meters).
Length- Section 5
Length of the recovery section of road (meters).
Turn direction
Direction the vehicle turns during the event (as seen by the driver).
Velocity
The initial speed of the vehicle (miles per hour).
Look ahead time
Look ahead time used by the Altair Driver.
Prediction step size
Maximum step size that the solver can take, in seconds (if the number is .02,
maximum step size is .02 seconds).
End Time
Absolute end time of the event, in seconds.
Print interval
Data is output to the plot files and graphics file at this time interval
(seconds).
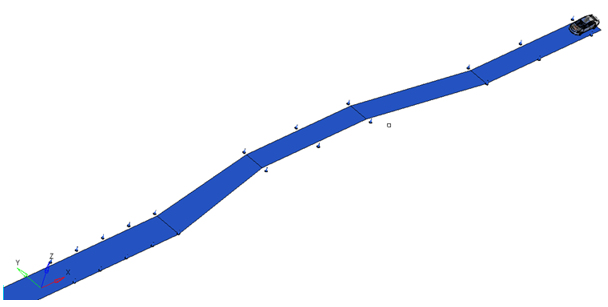
Figure 3.
References
ISO 3888-2-2011 Passenger cars — Test track for a severe lane-change maneuver.
NATO Allied Vehicle Testing Publication AVTP: 03-160 Sep. 1991.