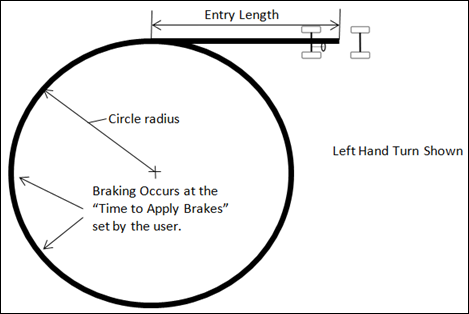
A Braking in a turn event simulates a vehicle decelerating in a circular path.
The purpose of this event is to measure the stability of a vehicle while braking and
turning. The vehicle is driven straight for the entry length and then turns onto the
circular path. At the "Time to Apply Brakes" time, the brake torque is ramped on using the
"Brake Step Duration" time so the vehicle slows at the "Desired Deceleration" rate. The
event ends at the "End of Simulation" time.
Standard outputs for the vehicle and tires are included in the event. The Altair Driver
maintains the proper speed, steers the vehicle, and decelerates at the proper time. Figure 1. Brake in Turn - Path Figure 2.
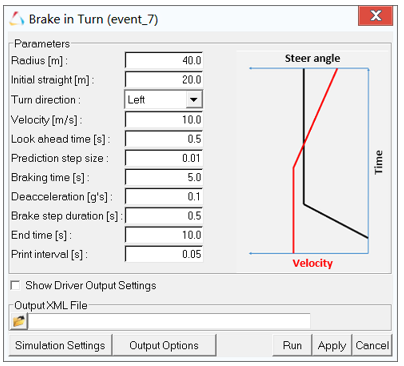
The parameters available in the Brake in Turn event are detailed in the following
table:
Parameter
Description
Radius
The radius of the circle that the vehicle CG will follow during the constant
radius portion of the event.
Initial straight
Length of the initial straight section. This section is used to allow the
vehicle to reach steady state.
Turn direction
Direction the vehicle turns during the event (as seen by the driver).
Velocity
Initial vehicle velocity (meters/sec).
Look ahead time
Time used by the Altair Driver to preview the road.
Prediction step size
Maximum step size used by MotionSolve
integrator.
Braking time
The absolute time (in seconds) when the brakes are first applied.
Deceleration
The deceleration rate of the vehicle in g’s.
Brake step duration
The length of time the brakes are applied.
End time
Absolute end time of the event, in seconds.
Print interval
Data is output to the plot files and graphics file at this time interval
(seconds).
Reference
ISO 7376-2006 - Passenger cars - Braking in A Turn - Open-loop test method.