3D to 2D/3D Element Mapping
3D linear or quadratic source element data can be mapped to 2D/3D target elements. 3D source elements can have loads or results which can be mapped.
-
Create and define a field entity.
-
In the Entity Editor, define the current model
using loads or results.
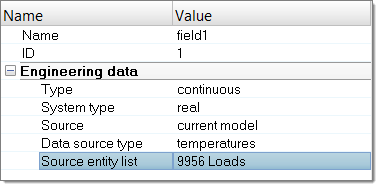
Figure 1.
-
In the Entity Editor, define the current model
using loads or results.
-
Realize the field:
-
In the Field Realization dialog, define the
realization settings.
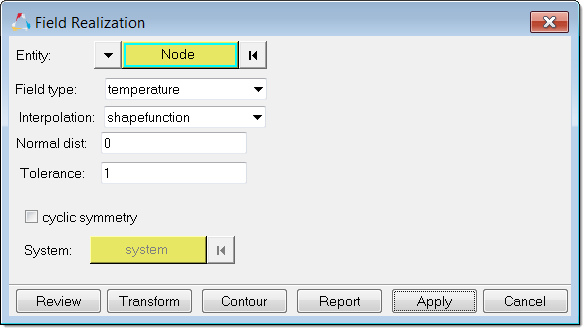
Figure 2.
-
In the Field Realization dialog, define the
realization settings.
-
Click Contour to contour the target elements of a mapped
temperature load from another 3D source model.
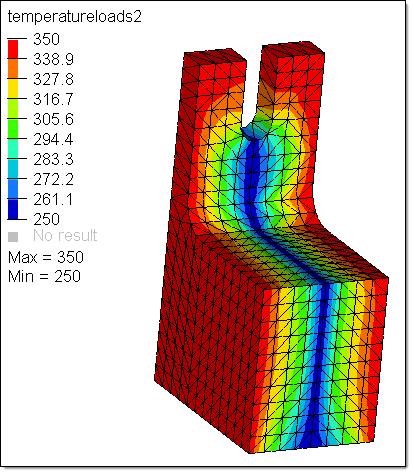
Figure 3.