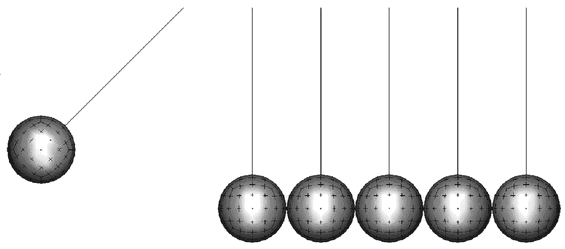
Five pendulums in line, initially in contact with each other, are struck by a sixth
one. The shock wave and oscillating motion are observed.
The purpose of this example is to simulate the oscillation and wave propagation of a group of
pendulums, arranged in a line, when impacted at one end. The material is described
as being elastic. Figure 1.
Two models are used to simulate two different physical problems:
The 2D model represents the infinite cylindrical mass for pendulums
The 3D model is necessary for determining the spherical mass
The quality of the model first depends on how contact is managed. For the 2D model, a
simple TYPE5 interface with a plane facet is used. For the 3D model, however, a
TYPE16 interface using the Lagrange Multipliers method is used.