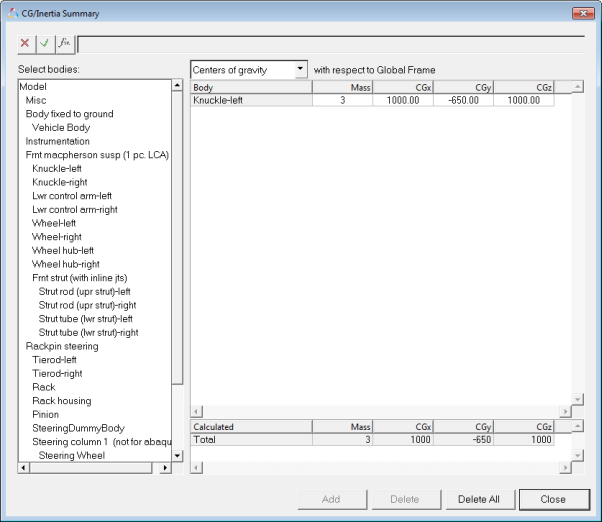
The total mass, center of gravity, and inertia of the models or bodies within a model
can be quickly obtained through the CG/Inertia Summary utility.
To add entities to the list, highlight entities from the model tree on the
left of the dialog and click Add.
When a system is added, all of its child entities, including other
sub-systems, get added to the list.
To remove an entity, highlight it in the table and click
Delete.
Flexbodies can also be included. The utility takes into account the calculated
flexbody properties and corrects the location of the flexbody reference frame if it
is not coincident with model reference frame. Figure 1. CG/Inertia Summary Dialog