MV-7010: Co-Simulation with Activate - Quadrotor Control
In this tutorial, you will learn how to use MotionSolve and Activate in a co-simulation to control a Quadrotor model.
Activate is a software solution for multi-disciplinary, dynamic system modeling and simulation. The software is especially useful for signal-processing and controller design that requires both continuous-time and discrete-time components.
A co-simulation enables MotionSolve and Activate models to communicate with each other during simulation. An ideal use case for co-simulation is the development of a control system for a multibody dynamics model.
Quadrotor Model and Control
A quadrotor model is a multirotor helicopter that uses 2 sets of identical fixed pitched propellers (2 clockwise and 2 counter-clockwise) to control lift and torque.
Control of vehicle motion is achieved by altering the rotation rate of one or more rotor discs, thereby changing its torque load and thrust or lift characteristics.
In MotionView you will create the quadrotor frame with 4 superblades and add the rotors motions. A set of forces will be used to represent the wind disturbance.
Activate, through co-simulation with MotionSolve, will implement a controller to impose altitude and direction in quadrotor trying to compensate against the wind effect.
Exercise
Copy the Quadrotor_start.mdl, rotor.h3d, shaft.h3d, superblade.h3d and Quadrotor_Control_Start.scm from <installation_directory>tutorials\mv_hv_hg\mbd_modeling\motionsolve\cosimulation\activate> to your <working directory>.
Reviewing the Model
-
Select File
Open model
 to load the Quadrotor_start.mdl file from your working
directory.
to load the Quadrotor_start.mdl file from your working
directory.
Specifying the Propellers Motions
-
Right-click Motions
 to display the Add Motion or MotionPair dialog.
to display the Add Motion or MotionPair dialog.
-
For Label and Variable, enter Prop_Left_Rotation and
mot_Prop_Left_Rotation, and click
OK.
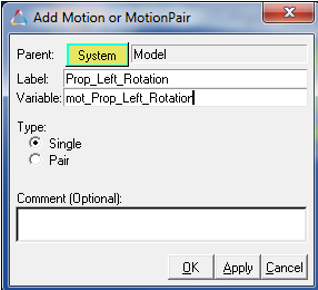
Figure 1. -
Change the Property to Velocity.

Figure 2.
Specifying the Velocity of the Propellers
-
Before you can specify the velocity, you must first create the solver
variables.
-
Right-click SolverVariable
 from the toolbar to display the
Add SolverVariable dialog.
from the toolbar to display the
Add SolverVariable dialog.
-
For Variable, enter sv_Throttle_Command and
click OK.
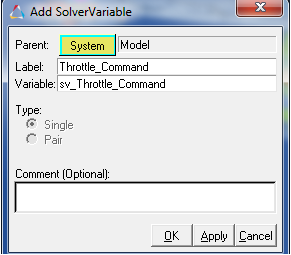
Figure 3.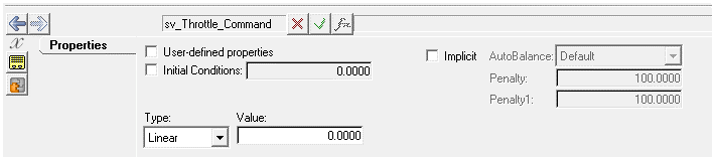
Figure 4.
-
Right-click SolverVariable
-
Now you can update the propeller motion velocity.
-
Repeat the steps above for Propeller Right, Front and Rear, following
the table entries below:
- Motion
- Expression
- Prop_Right_Rotation
-
`VARVAL({sv_Throttle_Command.idstring})-VARVAL({sv_Roll_Command.idstring})` - Prop_Front_Rotation
-
`-VARVAL({sv_Throttle_Command.idstring}) -VARVAL({sv_Pitch_Command.idstring})` - Prop_Rear_Rotation
-
`-VARVAL({sv_Throttle_Command.idstring})+ VARVAL({sv_Pitch_Command.idstring})`
Note: The lateral propellers (left and right) control the Roll of the vehicle and the vertical propellers control the Pitch. The signal difference in the expressions determine the rotation direction of the quadrotor.
Figure 5.
-
Repeat the steps above for Propeller Right, Front and Rear, following
the table entries below:
Adding Wind Disturbance Forces
To represent the wind effect and thrust of the quadrotor, a set of forces and moments must be defined.
The wind disturbance is represented as a combination of torques in the X and Y axle applied at the vehicle center.
Where,
= Thrust force
= Thrust factor (Defined considering the propeller geometry, air density,m and spin area. For this analysis Tf= 2.1998e-5).
= Propeller Angular velocity
-
Create the wind disturbance force.
-
Right-click Force
 to display the Add
Force dialog.
to display the Add
Force dialog.
-
For Body, select Vehicle and for Point, select
Pivot.
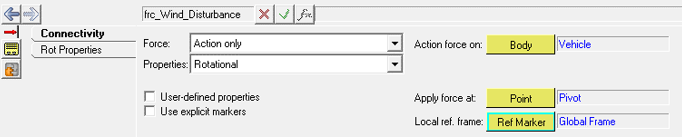
Figure 6. -
From the Rot Properties tab, set Tx and Ty to
0.5.
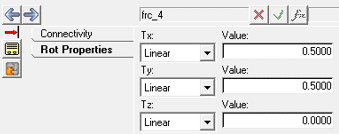
Figure 7.
-
Right-click Force
-
Create the thrust force.
-
Right-click Force
to display the Add
Force dialog.
-
For Body, select the body Rotor_Left, for Point,
select the point Left_Motor_Center, and for Ref
Marker select the marker Left_Rotor.
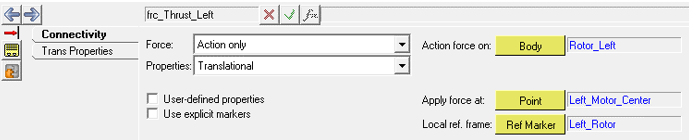
Figure 8. -
From the Trans Properties tab, change Fz to
Expression and enter the expression:
` `
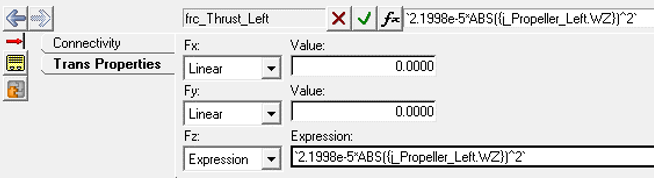
Figure 9. -
Repeat the steps to create the thrust force for the right, front, and
rear.
- Thrust Right
- Label
- Thrust_Right
- Variable
- frc_Thrust_Right
- Body
- Rotor_Right
- Point
- Right_Motor_Center
- Ref Marker
- Right_Rotor
- Fz Expression
- `2.1998e-5*ABS({j_Propeller_Right.WZ})^2`

Figure 10.- Thrust Front
- Label
- Thrust_Front
- Variable
- frc_Thrust_Front
- Body
- Rotor_Front
- Point
- Front_Motor_Center
- Ref Marker
- Front_Rotor
- Fz Expression
- `2.1998e-5*ABS({j_Propeller_Front.WZ})^2`

Figure 11.- Thrust Rear
- Label
- Thrust_Rear
- Variable
- frc_Thrust_Rear
- Body
- Rotor_Rear
- Point
- Rear_Motor_Center
- Ref Marker
- Rear_Rotor
- Fz Expression
- `2.1998e-5*ABS({j_Propeller_Rear.WZ})^2`

Figure 12.
-
Right-click Force
- To save your model, click Save As and save it with the name Quadrotor_tutorial.mdl
Creating Control Inputs and Plant Outputs
To modify the MBS model to work in a Co-Simulation Mode you need to add solver arrays and solver variables entities in MotionView model. The solver variables contain the individual plant input and output values. The solver arrays define the plant input and output to communicate with Activate.
-
Adding solver variables.
- The individual plant input solver variables were already defined with the propellers motion in Specifying the Velocity of the Propellers. They are Throttle_Command, Roll_Command and Pitch_Command.
-
Next, you will define the individual plant output values, which are Altitude,
Roll Angle, Pitch Angle, X position, Y position, X velocity and Y
velocity.
-
Right-click SolverVariable
from the toolbar to display the
Add SolverVariable dialog and add the following
solver variables:
Label Variable Expression Altitude sv_Altitude `DZ({m_Vehicle.idstring})`Roll_Angle sv_Roll_Angle `AY({m_Vehicle.idstring})`Pitch_Angle sv_Pitch_Angle `AX({m_Vehicle.idstring})`PosX sv_PosX `DX({m_Vehicle.idstring})`PosY sv_PosY `DY({m_Vehicle.idstring})`VX sv_VX `VX({m_Vehicle.idstring})`VY sv_VY `VY({m_Vehicle.idstring})`Note: Remember to set the Type in the SolverVariable Properties tab to Expression.
-
Right-click SolverVariable
-
Create two solver arrays, ControlInput and PlantOutput, to communicate with
Activate.
-
From the Properties tab, change the Array type to Plant
Input and enter 2 for Append (two
more signals).

Figure 13. -
Select Roll_Command for SolverVariable 1,
Throttle_Command for SolverVariable 2 and
Pitch_Command for SolverVariable 3 in this
order:
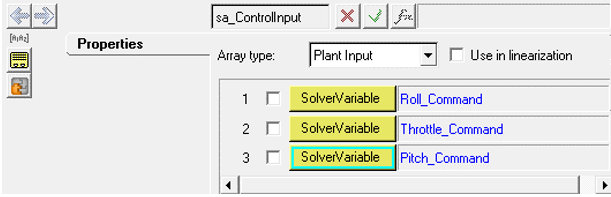
Figure 14.
-
From the Properties tab, change the Array type to Plant
Input and enter 2 for Append (two
more signals).
- Save your model.
Running the MBS Model in MotionSolve for Verification
-
Click Run Solver
 , rename the MotionSolve
input to Quadrotor_tutorial.xml and run the model.
, rename the MotionSolve
input to Quadrotor_tutorial.xml and run the model.
Connecting MotionSolve with Activate
-
Open Quadrotor_Control_Start .scm and review the model.
The system has 3 sections of control: Altitude of the quadrotor, X position and Y position. The X and Y position control is defined by a target path, for this model it is a slope of 0.025.
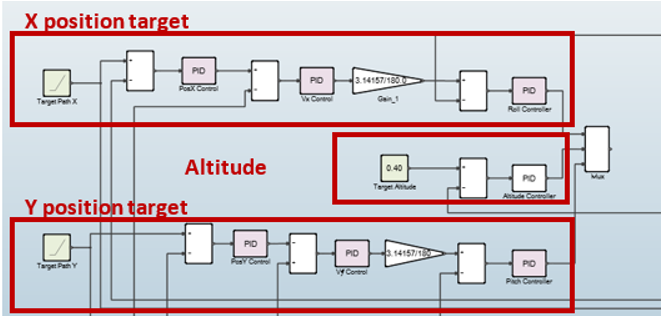
Figure 15.These three sections of controls defined by seven PIDs are the plant input for the MBS model. In MotionView, it's defined as Roll_Command, Throttle_Command and Pitch_Command.
The plant output, Roll_Angle, Altitude, Pitch_Angle, PosX, PosY, VX, and VY, are input for the PID controls.
For example, in the X position target control, you will see three inputs which come from the plant output (PosX, VX, and Roll Angle).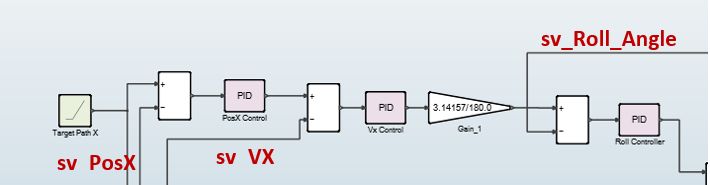
Figure 16. -
To enable co-simulation between Activate and
MotionSolve, from Activate, select . In the dialog that is displayed, define the MotionSolve and MotionView
license paths.
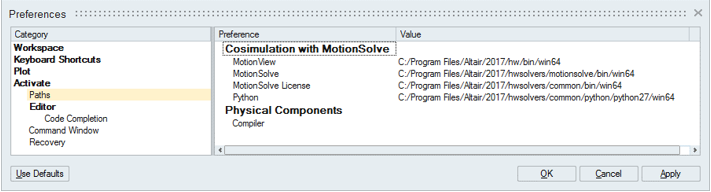
Figure 17. -
From the Palette Browser, select , and drag-and-drop the MotionSolve
block into the current diagram and connect the blocks.
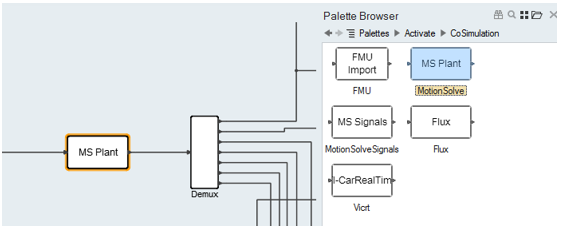
Figure 18. -
From the diagram, double-click the MS Plant block. From
the dialog that is displayed, define the following block properties:
The following parameters are populated automatically after you load the input model, *.mdl or *.xml:
- Inputs Row Size: The value 3 indicates that three signals are supplied from Activate to the MotionSolve model. These signals correspond to the solver array PlantInput, with variables Roll_Command, Throttle_Command and Pitch_Command.
- Outputs Row Size: The value 7 indicates that the MotionSolve model is sending out seven signals
from one port, which is why the Demux block is added to separate the
signals. The signals correspond to the solver array PlantOutput with
variables Roll_Angle, Altitude, Pitch_Angle, PosX, PosY, VX and VY.
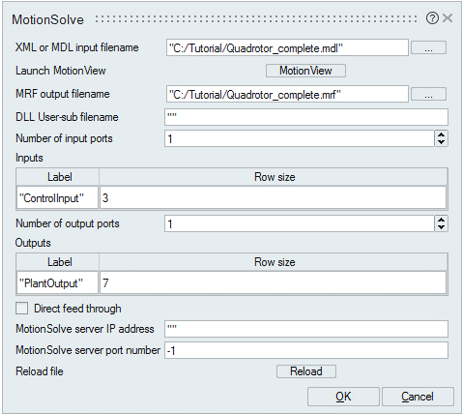
Figure 19.
-
Click and drag to connect the output of the block Mux to
Control Input of the MS Plant. Similarly, connect the Plant Output end of the MS
Plant to the input end of Dmux. All required blocks are
now present and connected in the modeling window.
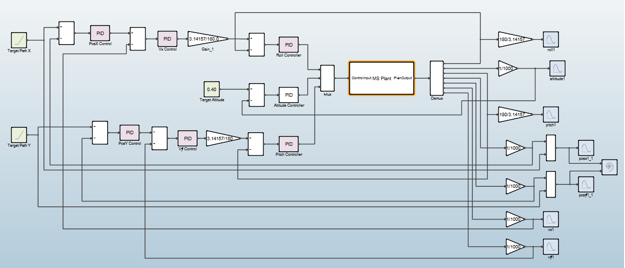
Figure 20. -
From the ribbon's Simulate tool group, select Setup
 tool. From the
Simulation Parameters dialog, in the Final Time field,
enter 12 so that your simulation runs for twelve
seconds.
tool. From the
Simulation Parameters dialog, in the Final Time field,
enter 12 so that your simulation runs for twelve
seconds.
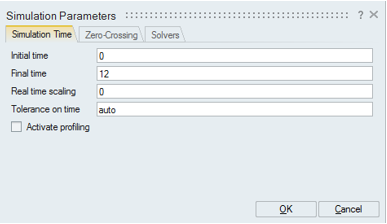
Figure 21.Note: Since Activate is the master, or calling, solver in this co-simulation scenario, if the simulation end time in Activate is different than the MotionSolve simulation end time, the MotionSolve simulation end time will be modified at run time to match the end time specified in the Activate dialog above. -
From the ribbon, click Run
 .
The Scope blocks in the model generate the following plots, which illustrate the altitude, roll, pitch, x position, y position, and the path.
.
The Scope blocks in the model generate the following plots, which illustrate the altitude, roll, pitch, x position, y position, and the path.
Figure 22. Altitude
Figure 23. Roll
Figure 24. Pitch
Figure 25. X Position
Figure 26. Y Position
Figure 27. X Velocity
Figure 28. Y Velocity
Figure 29. XY Path -
Launch HyperView and animate the
Quadrotor_tutorial.h3d file to see the quadrotor
behavior.
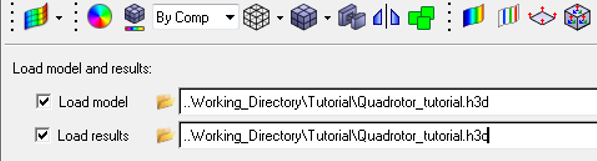
Figure 30.
Figure 31.