Create a global domain and global handles at useful positions throughout the space
frame.
From the Tools page, click HyperMorph.
Click Domains.
Select the Create subpanel.
Set the selector to global domain.
Set the toggle to all nodes.
Set the toggle to create handles.
Click create.
A global domain and global handles are created at useful positions
throughout the space frame.
If the handles are not where you want them to be, delete the handles and add
global handles elsewhere.
Open the Delete panel by pressing F2.
Delete unwanted handles.
Go to the HyperMorph module, Handles panel,
Create subpanel.
In the name field, enter a name for the handle.
Select an xyz position or any number of nodes where you want global
handles.
Click create.
A new global handle is created at each node or at the specified xyz location. If more
than one handle is created at a time, the handles will each be given a unique name
by appending a number after the name you have given. You should place global handles
both in areas where you want to apply perturbations and in areas that you want to
stay fixed. You can also use morph constraints to fix nodes in place during global
morphing but if you want them to affect the surrounding mesh you must select the
stretch mesh around nodes option when creating the morph constraint. If you want a
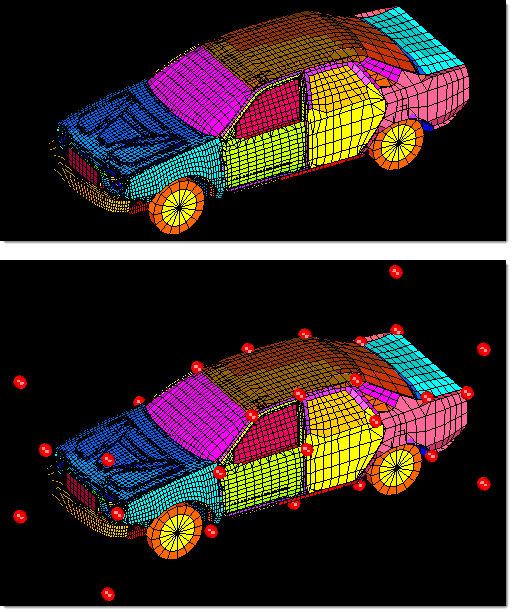
part of your model to move as a rigid body, such as a wheel or the engine block, use
a cluster type morph constraint. Figure 1. Global Domain and Global Handles for Full Car Model
Exiting any panel in the HyperMorph module or the Delete
panel automatically triggers HyperMorph to refresh the
handle influences, if necessary. Adding, editing, or deleting handles, domains, or
symmetries makes it necessary for HyperMorph to refresh
the handle influences. For large models or large changes, this can be time
consuming, so you will want to make all the changes you desire within each panel
before exiting.