Shape functions define the geometry of an element in its computational (intrinsic) domain.
As was seen in Finite Element Formulation, physical coordinates
are transformed into simpler computational intrinsic coordinates so that integration of
values is numerically more efficient.
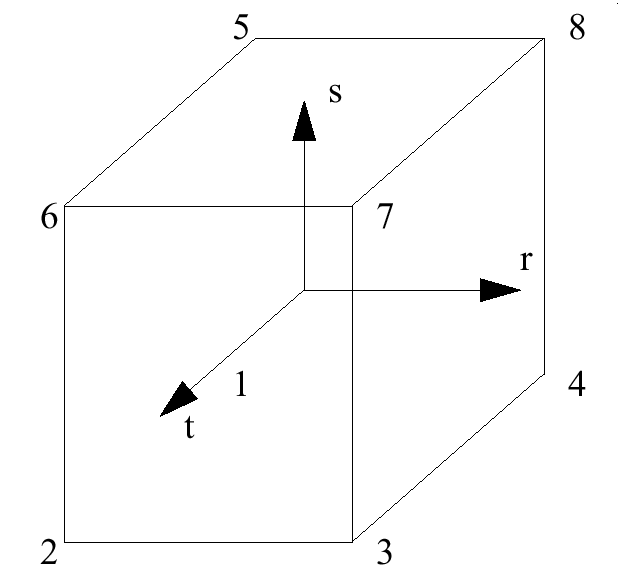
Figure 1. Node Brick Element
Where, r≡ξ, s≡η, and t≡ζ.
The shape functions of an 8 node brick element, shown in Figure 1, are given by:(1)